Version 2022.45.15
Släppt 8 april 2023
FSD Beta v11.3.6
Ingår i 2022.45.15
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
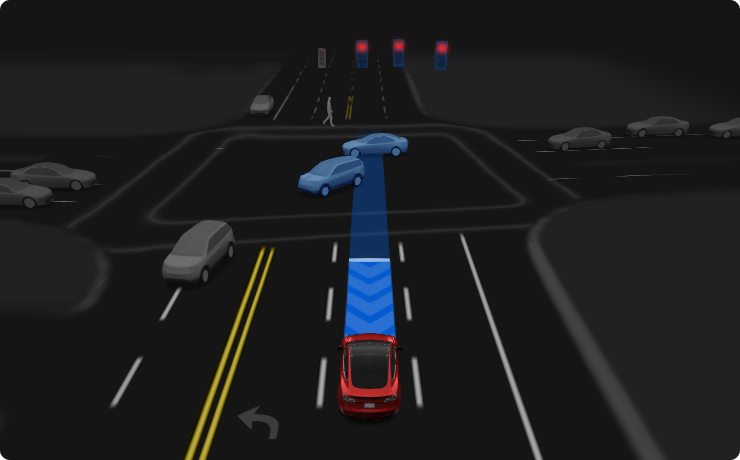
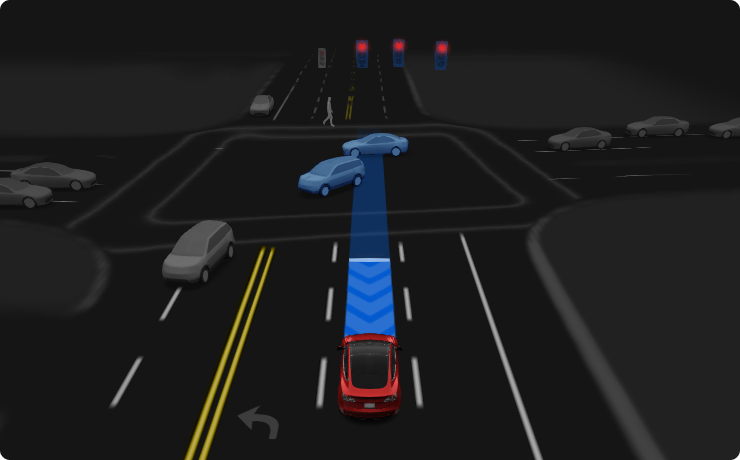
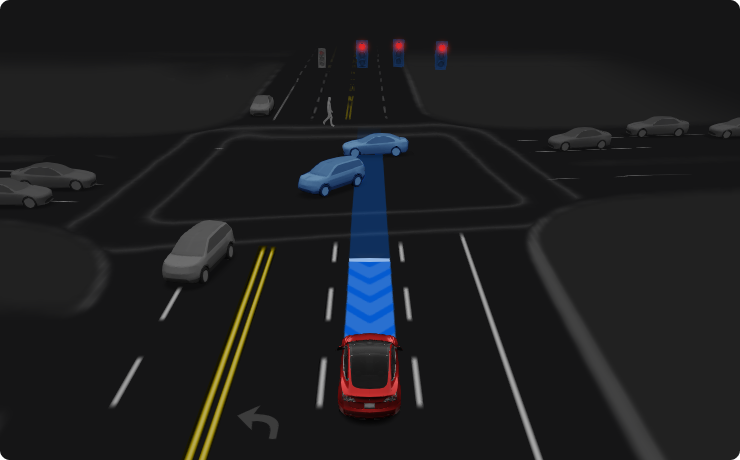
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
- Justerad position för den automatiska döda vinkeln-kameran när FSD Beta är aktiv för att prioritera Autopilot-visualiseringen. Dra kameran för att spara anpassade positioner.
OTA-återkallelse (Over-the-Air)
Ingår i 2022.45.15
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.
FSD Beta v11.3.5
Ingår i 2022.45.14
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
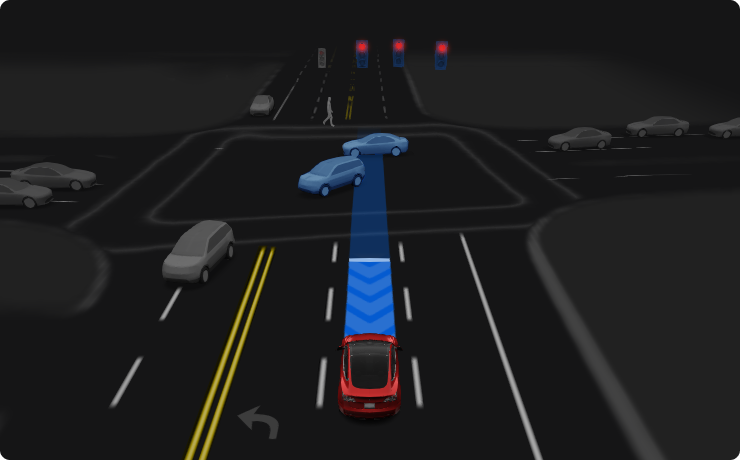
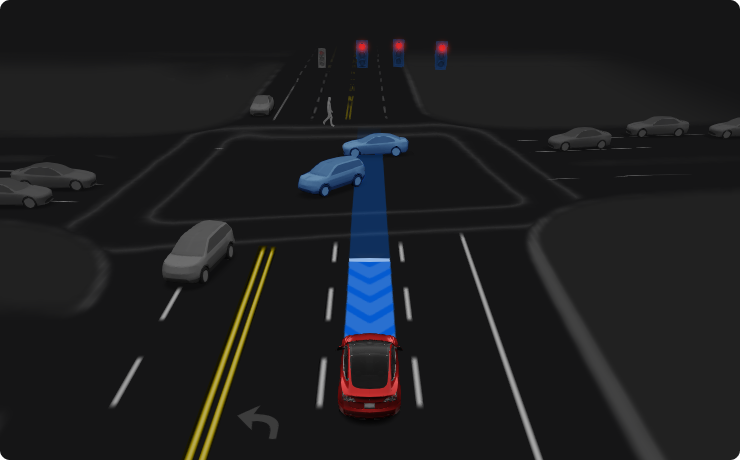
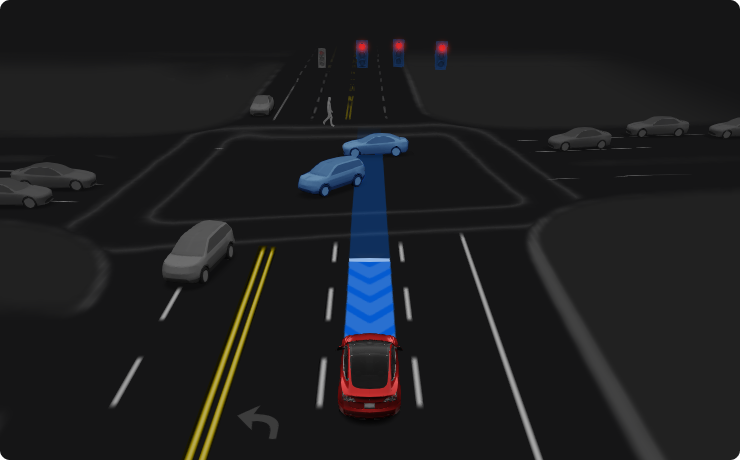
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
- Justerad position för den automatiska döda vinkeln-kameran när FSD Beta är aktiv för att prioritera Autopilot-visualiseringen. Dra kameran för att spara anpassade positioner.
OTA-återkallelse (Over-the-Air)
Ingår i 2022.45.14
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.
FSD Beta v11.3.4
Ingår i 2022.45.13
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
- Justerad position för den automatiska döda vinkeln-kameran när FSD Beta är aktiv för att prioritera Autopilot-visualiseringen. Dra kameran för att spara anpassade positioner.
OTA-återkallelse (Over-the-Air)
Ingår i 2022.45.13
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.
FSD Beta v11.3.3
Ingår i 2022.45.12
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
- Justerad position för den automatiska döda vinkeln-kameran när FSD Beta är aktiv för att prioritera Autopilot-visualiseringen. Dra kameran för att spara anpassade positioner.
OTA-återkallelse (Over-the-Air)
Ingår i 2022.45.12
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.
FSD Beta v11.3.2
Ingår i 2022.45.11
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
- Justerad position för den automatiska döda vinkeln-kameran när FSD Beta är aktiv för att prioritera Autopilot-visualiseringen. Dra kameran för att spara anpassade positioner.
OTA-återkallelse (Over-the-Air)
Ingår i 2022.45.11
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.
FSD Beta v11.3.1
Ingår i 2022.45.10
- Aktiverade FSD Beta på motorväg. Detta förenar visions- och planeringsstacken på och utanför motorvägen och ersätter den äldre motorvägsstacken, som är över fyra år gammal. Den äldre motorvägsstacken förlitar sig fortfarande på flera nätverk med en enda kamera och en enda bildruta och var inställd för att hantera enkla körfältsspecifika manövrar. FSD Betas videonätverk med flera kameror och nästa generations planerare, som möjliggör mer komplexa interaktioner mellan agenter med mindre beroende av körfält, gör det möjligt att lägga till mer intelligenta beteenden, smidigare styrning och bättre beslutsfattande.
- Förbättrad minnesbild för närliggande inkörningsfall med 15%, särskilt för stora lastbilar och scenarier med hög girhastighet, genom ytterligare 30 000 automatmärkta klipp som hämtats från fordonsparken. Dessutom utökades och finjusterades den dedikerade hastighetskontrollen för inkörningsobjekt.
- Förbättrad position för ego i breda körfält genom att förskjuta i riktning mot den kommande svängen så att andra bilar kan manövrera runt ego.
- Förbättrad väghållning vid scenarier med hög kurvatur eller stora lastbilar genom att förskjuta körfältet för att bibehålla säkra avstånd till andra fordon på vägen och öka komforten.
- Förbättrat beteende vid blockering av körfält i tät trafik. Ego kommer nu att hålla större avstånd i blockerade körfält för att täcka upp för eventuella luckor i tät trafik.
- Förbättrade filbyten i täta trafiksituationer genom att tillåta högre acceleration under uppriktningsfasen. Detta resulterar i ett mer naturligt gap-val för att köra om fordon i angränsande körfält mycket nära ego.
- Gör svängarna smidigare genom att förbättra detektionskonsistensen mellan körfält, linjer och vägkantsprognoser. Detta uppnåddes genom att integrera den senaste versionen av modulen för körfältsstyrning i nätverket för vägkanter och linjer.
- Förbättrad precision för att upptäcka andra fordons rörliga semantik. Förbättrad precision med 23% för fall där andra fordon övergår till att köra och minskat fel med 12% för fall där Autopilot felaktigt upptäcker att dess ledande fordon är parkerat. Detta uppnåddes genom att öka videokontexten i nätverket, lägga till mer data om dessa scenarier och öka förluststraffet för kontrollrelevanta fordon.
- Utökad horisont för optimering av maximal bana, vilket resulterar i mjukare styrning för vägar med hög kurvatur och fordon som befinner sig långt bort vid körning i motorvägshastighet.
- Förbättrat körbeteende intill en rad parkerade bilar i smala körfält, föredrar att väja och hålla sig i körfältet istället för att i onödan byta fil eller sakta in.
- Förbättrade filbytesmanövrar med back-to-back genom bättre fusion mellan visionsbaserad lokalisering och körfältsräkningar på grov karta.
- Lagt till textskyltar i användargränssnittet för att kommunicera kommande manövrar som FSD Beta planerar att göra. Vi har också förbättrat visualiseringen av kommande inbromsningar längs fordonets väg. Chevrons återges med varierande opacitet och hastighet för att indikera inbromsningsintensiteten, och en heldragen linje visas på platser där bilen kommer att stanna.
- Förbättrad återkallelse och precision för objektdetektering, vilket särskilt minskade positionsfelet för semitruckar med 10%, ökade återkallelsen och precisionen för korsande fordon på över 100 meters avstånd med 3% respektive 7% och ökade återkallelsen för motorcyklar med 5%. Detta uppnåddes genom att implementera ytterligare kvalitetskontroller i vårt dataset med två miljoner autolabelmärkta videoklipp.
- Minskad falsk förskjutning runt objekt i breda körfält och nära korsningar genom förbättrad modellering av objektkinematik i lågfartsscenarier.
OTA-återkallelse (Over-the-Air)
Included in 2022.45.10
I enlighet med en nyligen genomförd återkallelse (kampanj #23V085 för USA och #2023-063 för Kanada) gör Tesla förbättringar av följande specifika beteenden inom FSD Beta:
1. Förbättrad beslutslogik för att fortsätta genom eller stanna vid vissa gula ljus genom att modellera beslutet som en avvägningsram som tar hänsyn till uppskattade: retardation som krävs för att stanna, tid för att komma in i och ut ur korsningen och den sträcka som korsas genom korsningen innan ljuset växlar till rött. Detta bör göra hanteringen av gula ljus mer naturlig och människoliknande.
2. Förbättrad kontrollprofil för longitudinell inbromsning när man leder fram till korsningar med stoppskyltar för att göra den övergripande manövern mer märkbar och naturlig.
3. Förbättrade Teslas hastighetsanpassning när den kör in i vissa hastighetszoner genom att möjliggöra tidigare kontroll av upptäckta skyltar för hastighetsbegränsning. Den bestämda responsen vid inbromsning för upptäckta skyltar om hastighetsgränser bestäms av den aktuella hastigheten och dess skillnad mot den hastighet som indikeras av den upptäckta skylten. Ett visuellt sken har lagts till bakom hastighetsbegränsningsikonen på användargränssnittet för att varna föraren när fordonets inställda hastighet överskrider den detekterade hastighetsbegränsningen med mer än 50%. Slutligen togs alternativet för en absolut hastighetsgränsförskjutning i FSD Beta bort; endast den procentbaserade förskjutningen kommer att vara tillgänglig.
4. Uppdaterade beteendet för vissa scenarier där Tesla kan manövrera från en svängfil för att fortsätta köra rakt fram. Dessa manövrar kommer nu att behandlas som ett filbyte, där svängindikatorn används för att varna andra förare om Teslas avsikt.
Som en påminnelse är föraren ansvarig för fordonets drift även när FSD Beta är aktiverat. Du måste ständigt ha uppsikt över vägen, hålla händerna på ratten och vara beredd att ingripa för att upprätthålla säkerheten.